Le radar a été l'un des ajouts les plus importants aux véhicules au cours des deux dernières décennies. Il fournit des fonctions de luxe des systèmes avancés d'aide à la conduite (ADAS) comme le régulateur de vitesse adaptatif (ACC), ainsi que des fonctions de sécurité essentielles comme le freinage d'urgence automatique et la détection de l'angle mort. Il est passé du statut d'accessoire coûteux sur les
voitures les plus haut de gamme à une présence presque omniprésente dans toutes les gammes de
prix.
Les recherches menées par IDTechEx dans "Radar
automobile 2024-2044 : prévisions, technologies, applications" montrent qu'en moyenne, 70 % des nouvelles voitures expédiées en 2022 étaient équipées d'un radar frontal, tandis que 30 % avaient des
radars latéraux. Toutefois, les systèmes ADAS devenant plus sophistiqués et les systèmes autonomes de niveau 3 entrant pour la première fois sur le marché, la technologie radar doit s'améliorer pour répondre aux nouvelles exigences de performance que ces systèmes requièrent. Ainsi, l'industrie voit aujourd'hui les premières générations de radars "d'imagerie 4D" arriver sur le marché et être déployées sur les véhicules.
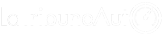
Qu'est-ce qu'un radar d'imagerie 4D ?Tout d'abord, un radar 4D n'est pas automatiquement un radar d'imagerie. Les deux terminologies peuvent parfois sembler interchangeables, mais il est important de faire la distinction entre les deux. Dans le passé, la plupart des radars étaient limités à trois dimensions, à savoir l'azimut (angle horizontal), la distance et la vitesse. Un radar 4D signifie simplement l'ajout d'une capacité de résolution dans la direction de l'élévation.
Un exemple classique qui souligne la nécessité de cette quatrième dimension est le scénario de la détection d'une
voiture garée à l'entrée d'un tunnel. Un radar 3D donnera les mêmes résultats, qu'il y ait ou non une voiture à l'entrée. Normalement, le véhicule suppose que le grand reflet est un tunnel et le système de régulation adaptative de la vitesse continue. Ce comportement est parfaitement acceptable si un être humain est au volant et peut neutraliser le système ACC en conséquence, mais il devient problématique pour les véhicules fonctionnant au niveau
SAE 3 et plus, ce qui est devenu une réalité au cours des deux dernières années.
En théorie, un radar 4D résoudra ce problème. L'ajout de la résolution verticale signifie que le radar devrait être capable de séparer le véhicule arrêté au niveau du sol du tunnel situé à quelques mètres au-dessus du pont. Toutefois, si la résolution verticale est mauvaise au point que le tunnel et la voiture sont toujours présents dans le même "pixel", la situation n'a pas été améliorée. C'est là qu'intervient la distinction entre le radar 4D et le radar d'imagerie 4D. Le radar imageur doit avoir une résolution angulaire suffisante pour pouvoir distinguer le tunnel et le véhicule même à de très grandes distances. En fait, IDTechEx pense qu'un radar imageur devrait avoir une résolution suffisante pour distinguer des obstacles beaucoup plus petits à de longues distances, par exemple une personne sur la route à 100 mètres. Mais quelle est la résolution nécessaire pour y parvenir ? En supposant que la personne mesure 1,5 m, une résolution d'environ 1° serait nécessaire pour la distinguer de la route. Dans ce scénario, le système aurait suffisamment de temps pour activer les freins et arrêter le véhicule, évitant ainsi une collision, même à grande vitesse.
Cependant, être capable de détecter une personne est une chose, la classer correctement comme telle avec les seules données du radar en est une autre. C'est pourquoi les radars sont généralement associés à des caméras frontales pour des applications telles que le freinage d'urgence automatique. La nuit, dans le brouillard ou sous une pluie battante, il se peut que la caméra ne puisse pas non plus voir. Dans ces situations, il existe plusieurs
options : ajouter au véhicule une détection infrarouge à ondes courtes ou à ondes longues, qui offre une résolution similaire à celle d'une caméra et résiste aux conditions de mauvaise visibilité, ajouter un LiDAR au véhicule, qui offre des capacités de télémétrie similaires à celles d'un radar, mais à un
coût élevé, ou améliorer encore la résolution d'un radar.
Obtenir une résolution de 1° et au-delàLes radars ont une limite physique naturelle à leur performance de résolution, connue sous le nom de critère de Rayleigh, qui est proportionnelle à l'inverse de la fréquence multipliée par la taille de l'ouverture (). En bref, un radar automobile normal fonctionnant à 77 GHz et doté d'un réseau d'antennes de 10 cm de large devrait pouvoir atteindre une résolution de 2,8° . À titre de comparaison, un œil humain typique peut atteindre une résolution d'environ 0,005-0,01°, ce qui est suffisant pour voir un objet de 1 cm à 100 m. Pour améliorer la résolution du radar, sa fréquence de fonctionnement pourrait être augmentée. Après tout, les humains utilisent la lumière visible, qui se situe dans les centaines de térahertz. Toutefois, la fréquence des radars est limitée par la réglementation et n'est pas facile à modifier.
L'option suivante consiste à augmenter la taille de l'ouverture. Bien que cela soit techniquement possible, cela pose des problèmes d'ordre pratique. Pour passer de 2,8° à 1°, l'ouverture doit passer de 10 cm à 28 cm. Pour obtenir cette résolution en azimut et en élévation, le radar mesure maintenant 28 cm x 28 cm, ce qui sera difficile à intégrer dans le pare-chocs avant. Il causera probablement des problèmes d'écoulement d'air au niveau du radiateur, pourrait être difficile à protéger contre les dommages et donnera du fil à retordre aux équipes chargées de l'esthétique chez les équipementiers. Des radars deviennent plus grands. L'ARS540 de Continental, le FR5 plus de Bosch et le Phoenix d'Arbe dépassent tous les 10 cm, mais le plus grand d'entre eux, le Phoenix, ne mesure encore que 12,7 cm x 14,3 cm.
Un autre problème lié à la création de radars plus grands est de les remplir de canaux. Créer un radar de 28 cm x 28 cm sans la technologie des semi-conducteurs correspondante reviendrait à construire un objectif d'appareil photo DSLR de 10 000 dollars et à l'associer à un capteur d'appareil photo de téléphone de 1 mégapixel datant de 2001. Ici, les pixels sont remplacés par des canaux virtuels, c'est-à-dire le multiple des canaux d'émission et de réception d'un radar (Tx et Rx). Dans le passé, un radar 3D pouvait avoir un canal d'émission et trois canaux de réception (1Tx/3Rx). Un radar 4D de base utiliserait probablement un émetteur-récepteur radar avec un arrangement 3Tx/4Rx, tandis que certains radars de pointe combinent quatre de ces puces pour obtenir un arrangement 12Tx/16Rx avec 192 canaux virtuels. Arbe a mis au point un jeu de puces qui permet de passer à 48Tx/48Rx dans un seul radar, ce qui donne 2 304 canaux virtuels. Cela permet à Arbe d'obtenir une résolution de 1° en azimut et de 1,7° en élévation.
L'un des moyens de relever les défis liés à la construction d'un très grand radar consiste à le répartir d'une manière ou d'une autre. Quelques approches vont dans ce sens. L'une d'entre elles, proposée par Zendar, consiste à utiliser deux radars moins performants placés aux extrémités opposées du pare-chocs et fonctionnant ensemble. La taille de l'ouverture est passée de moins de 10 cm à 1,5-2 mètres. Ainsi, la résolution de ces deux radars travaillant ensemble est légèrement supérieure à 0,1° dans l'azimut. Une autre approche consiste à construire des cartes d'antenne séparées pour chaque canal (sur un radar 3Tx/4Rx) et à les placer en travers du pare-chocs. C'est la voie de développement explorée par Plastic Omnium et Greener Wave.
Le logiciel est un autre aspect clé et presque toutes les entreprises mentionnées utiliseront une forme ou une autre de logiciel de super résolution pour améliorer leurs
performances. Pour revenir à l'analogie avec l'appareil photo, les appareils photo reflex modernes sont équipés de puissants processeurs capables de tirer le meilleur parti d'une image, tandis que les appareils photo des téléphones modernes ont fait l'objet d'années de développement logiciel pour produire les résultats les plus nets et les plus naturels.
Dans le domaine des radars, il existe quelques exemples de start-ups qui élaborent des algorithmes exemplaires pour améliorer la résolution des radars sans apporter de modifications physiques.
Zadar Labs utilise des technologies telles que l'apprentissage automatique, l'IA et les signaux de transmission codés pour améliorer les performances des radars.
Spartan, quant à elle, utilise un algorithme basé sur la recherche pour les applications des avions de chasse F-18 et F-35. Les logiciels de super-résolution peuvent améliorer la résolution angulaire d'un facteur 4, ce qui permet de réduire la résolution angulaire d'un radar standard de 2,8° à 0,5-1°, voire moins s'il utilise déjà certaines des autres techniques évoquées.
Le balayage est une autre option prometteuse pour les radars. L'antenne à métamatériaux de Metawave utilise les technologies de formation et d'orientation des faisceaux pour concentrer les performances du radar dans un mince éventail. Cet éventail est ensuite balayé dans le champ de
vision en élévation souhaité, ce qui permet d'améliorer la résolution en élévation et en azimut. L'autre avantage de cette technologie est que l'énergie d'émission est répartie sur une zone beaucoup plus petite que dans le cas d'une approche de type flash, ce qui signifie qu'elle permet d'atteindre des portées plus longues que dans le cas d'une approche équivalente sans balayage.
Source : IDTechEx. Analyse comparative des technologies radar d'IDTechEx.
Auteur : Dr James Jeffs, analyste technologique principal à IDTechEx




























 Newsletter
Newsletter