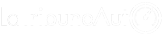
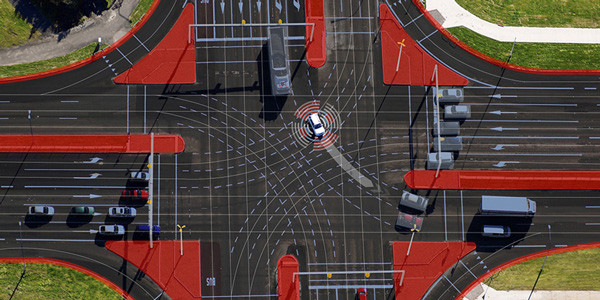
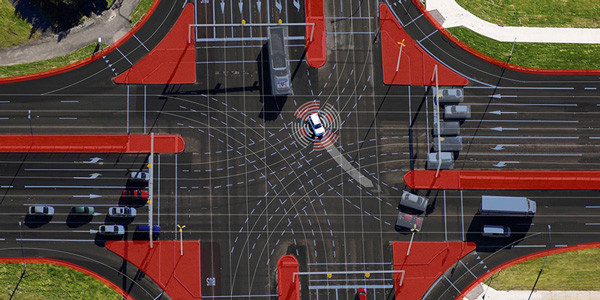
Les voitures communiquent avec les infrastructures en milieu urbain via les lampadaires
Piétons masqués par les véhicules, cyclistes passant devant la voiture, autobus qui surgissent : la
circulation urbaine peut rapidement être complexe pour un
conducteur humain et encore davantage pour des
logiciels de conduite automatisée.
Le projet de recherche MEC-View a cherché à déterminer
comment les lampadaires pourraient fournir aux véhicules automatisés un aperçu de la circulation et rendraient la circulation plus sécuritaire.
La recherche MEC-View a été conduite par Bosch en collaboration avec Mercedes-Benz, Nokia, Osram, Tomtom, IT Designers, l'Université de Duisburg-Essen et l'Université d'Ulm.
Le projet, testé dans des conditions de conduite réelles à Ulm depuis 2018, requiert que
les lampadaires soient équipés de capteurs vidéo et lidars, utilisant une technologie cellulaire de pointe pour fournir aux véhicules les informations nécessaires en temps réel, leur permettant ainsi de détecter les obstacles de manière rapide et fiable.
Atteignant
jusqu'à six mètres de hauteur, les lampadaires bénéficient d'un emplacement privilégié au-dessus de la circulation
routière. Ils ont
une vue d'ensemble en temps réel de l'évolution du trafic aux intersections, par exemple – exactement le type d'informations dont les véhicules automatisés auront besoin à l'avenir. Alors que les systèmes de capteurs d'un véhicule – caméras, radars et capteurs lidars – permettent une
vision précise à 360 degrés, la visibilité depuis le véhicule seul, n'est pas toujours suffisante pour détecter un piéton masqué par un camion, un véhicule sortant d'un accès peu visible, ou un cycliste en approche par l'arrière et changeant brusquement de voie.
Les capteurs de lampadaires permettent d'
étendre le champ de vision des capteurs du véhicule, qui ne peut pas voir dans les angles morts ou à travers les murs.
Les capteurs d'infrastructure connectés
rendent la conduite automatisée plus sûre.
Les capteurs dans les lampadaires rendent possible la
détection d'objets à un stade précoce, même si partiellement visibles.Les partenaires du projet MEC-View ont développé le matériel et les logiciels dans ce but. Le système traite les images et les signaux provenant des capteurs d'infrastructure, les combine avec des cartes numériques à haute résolution (cartes HD) et les transmet au véhicule « over the air ».
Les données sont ensuite fusionnées avec les informations des capteurs du véhicule pour obtenir une image précise de la situation, intégrant l'ensemble des usagers de la route présents.
La technologie cellulaire avancée permet une transmission à faible latence de l'information des capteurs. Le projet MEC-View utilise la technologie de communication mobile LTE avec une configuration optimisée selon la norme de communication 5G. La transmission de données en temps réel sans fil quasi instantanée est une fonction de base. La communication mobile à latence optimisée permet aussi le traitement des données au plus près possible de la source.
Le traitement des données est exécuté par des ordinateurs spéciaux, appelés mobile
edge computing servers (ou serveurs MEC), qui sont intégrés directement dans le réseau cellulaire. Ils combinent les données du capteur de lampadaire avec les données des capteurs du véhicule et des cartes numériques. À partir des données collectées, ils produisent un modèle de l'
environnement qui comprend toutes les informations disponibles sur la situation de la circulation en temps réel et rendent ce modèle disponible pour les véhicules « over the air ».
À l'avenir, des installations comme les centres de contrôle de la circulation urbaine pourraient être équipés de ce type de serveurs, de sorte qu'ils puissent partager les données avec tous les véhicules, quel que soit le constructeur, et les autres usagers de la route.
Dans le cadre du projet MEC-View, les partenaires ont testé depuis 2018 les communications entre les prototypes de véhicules automatisés et les capteurs d'infrastructure dans des conditions de circulation réelles 0 Ulm. Une intersection dans le quartier Lehr d'Ulm est connue pour son manque de visibilité. Des capteurs ont été installés sur les lampadaires afin d'aider les véhicules automatisés à franchir cette intersection, et à rejoindre la route principale depuis une route secondaire. Grâce à la technologie développée, le prototype automatisé reconnaît les usagers de la route et peut adapter sa stratégie de conduite en conséquence. Le véhicule identifie les problèmes de circulation sur la route principale et s'insère dans la circulation.

































 Newsletter
Newsletter